讀取 GPS 數據 - Wio Terminal
在本課程中,你將為 Wio Terminal 添加一個 GPS 傳感器,並從中讀取數據。
硬體
Wio Terminal 需要一個 GPS 傳感器。
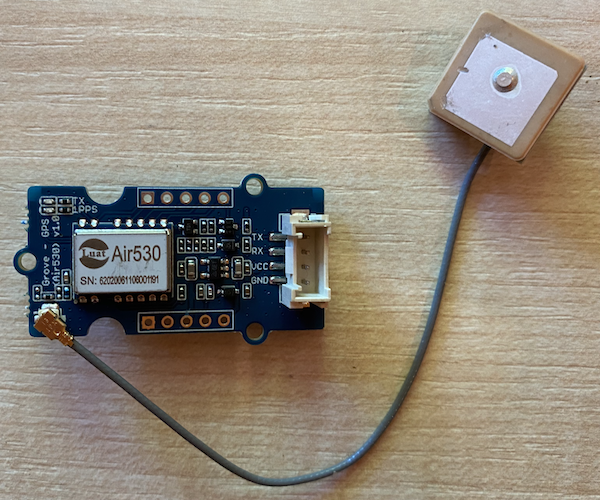
你將使用的傳感器是 Grove GPS Air530 傳感器。這個傳感器可以連接到多個 GPS 系統,以獲得快速、準確的定位。傳感器由兩部分組成 - 傳感器的核心電子元件和通過細線連接的外部天線,用於接收來自衛星的無線電波。
這是一個 UART 傳感器,因此通過 UART 傳輸 GPS 數據。
連接 GPS 傳感器
Grove GPS 傳感器可以連接到 Wio Terminal。
任務 - 連接 GPS 傳感器
連接 GPS 傳感器。
-
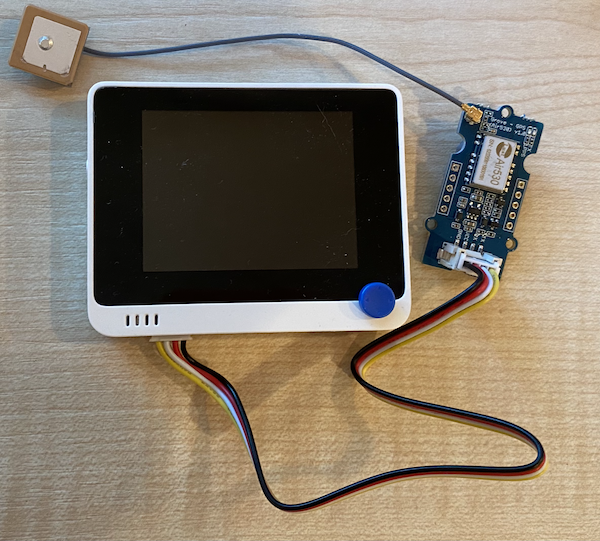
將 Grove 電纜的一端插入 GPS 傳感器上的插座。它只能以一種方式插入。
-
在 Wio Terminal 與電腦或其他電源斷開連接的情況下,將 Grove 電纜的另一端連接到 Wio Terminal 左側的 Grove 插座,這是靠近電源按鈕的插座。
-
將 GPS 傳感器放置在天線可以看到天空的位置 - 最好靠近開放的窗戶或在室外。天線沒有障礙物時更容易獲得清晰的信號。
-
現在你可以將 Wio Terminal 連接到電腦。
-
GPS 傳感器有兩個 LED - 一個藍色 LED 在數據傳輸時閃爍,另一個綠色 LED 在接收來自衛星的數據時每秒閃爍一次。確保在啟動 Wio Terminal 時藍色 LED 閃爍。幾分鐘後,綠色 LED 會閃爍 - 如果沒有,你可能需要重新定位天線。
編程 GPS 傳感器
現在可以編程 Wio Terminal 以使用連接的 GPS 傳感器。
任務 - 編程 GPS 傳感器
編程設備。
-
使用 PlatformIO 創建一個全新的 Wio Terminal 項目。將此項目命名為
gps-sensor。在setup函數中添加代碼以配置串行端口。 -
在
main.cpp文件的頂部添加以下包含指令。這包括一個頭文件,其中包含配置左側 Grove 端口為 UART 的函數。#include <wiring_private.h> -
在此之下,添加以下代碼行以聲明與 UART 端口的串行端�口連接:
static Uart Serial3(&sercom3, PIN_WIRE_SCL, PIN_WIRE_SDA, SERCOM_RX_PAD_1, UART_TX_PAD_0); -
你需要添加一些代碼將一些內部�信號處理程序重定向到此串行端口。在
Serial3聲明下添加以下代碼:void SERCOM3_0_Handler()
{
Serial3.IrqHandler();
}
void SERCOM3_1_Handler()
{
Serial3.IrqHandler();
}
void SERCOM3_2_Handler()
{
Serial3.IrqHandler();
}
void SERCOM3_3_Handler()
{
Serial3.IrqHandler();
} -
在
setup函數中配置Serial端口的代碼下方,使用以下代碼配置 UART 串行端口:Serial3.begin(9600);
while (!Serial3)
; // 等待 Serial3 準備好
delay(1000); -
在
setup函數中的此代碼下方,添加以下代碼以將 Grove 引腳連接到串行端口:pinPeripheral(PIN_WIRE_SCL, PIO_SERCOM_ALT); -
在
loop函數之前添加以下函數以將 GPS 數據發送到串行監視器:void printGPSData()
{
Serial.println(Serial3.readStringUntil('\n'));
} -
在
loop�函數中,添加以下代碼以從 UART 串行端口讀取並將輸出打印到串行監視器:while (Serial3.available() > 0)
{
printGPSData();
}
delay(1000);此代碼從 UART 串行端口讀取數據。
readStringUntil函數讀取直到終止符字符,在本例中為新行。這將讀取整個 NMEA 句子(NMEA 句子以新行字符終止)。只要可以從 UART 串行端口讀取數據,它就會被讀取並通過printGPSData函數發送到串行監視器。一旦無法再讀取數據,loop會延遲 1 秒(1,000 毫秒)。 -
構建並上傳代碼到 Wio Terminal。
-
上傳後,你可以使用串行監視器監控 GPS 數據。
> Executing task: platformio device monitor <
--- Available filters and text transformations: colorize, debug, default, direct, hexlify, log2file, nocontrol, printable, send_on_enter, time
--- More details at http://bit.ly/pio-monitor-filters
--- Miniterm on /dev/cu.usbmodem1201 9600,8,N,1 ---
--- Quit: Ctrl+C | Menu: Ctrl+T | Help: Ctrl+T followed by Ctrl+H ---
$GNGGA,020604.001,4738.538654,N,12208.341758,W,1,3,,164.7,M,-17.1,M,,*67
$GPGSA,A,1,,,,,,,,,,,,,,,*1E
$BDGSA,A,1,,,,,,,,,,,,,,,*0F
$GPGSV,1,1,00*79
$BDGSV,1,1,00*68
💁 你可以在 code-gps/wio-terminal 文件夾中找到此代碼。
😀 你的 GPS 傳感器程序成功了!